
Browse
光說不練嘴把戲,光練不說傻把戲,說著練著真把戲。
—董每戡
如果在地實驗媒體劇場《梨園新意:蕭賀文》這個機械操偶表演所在意的並非敘事,而是機器人偶如何能夠承擔部份表演責任 (註1),那麼我們就得從機器人偶與真人之間肢體動作兩者間的符應度來思考蕭賀文這個機器人偶在表演上的得失源於何處。或許我們必須先行回頭思考歷史上某些階段,藉以定位《梨園新意:蕭賀文》所用之機器人偶最基本的一些環節。
重力:動作美妙與否與表演者是否為人無關
德國文學家克萊斯特(Heinrich von Kleist)曾經在〈論木偶戲(Über das Marionettentheater;1810)〉這個短篇中將劇場中的舞者與木偶拿來比較,對克萊斯特來說,舞蹈動作的完美與否繫於「(內在)重心」的掌握。(註2) 簡單地說,不管是舞者還是木偶,只要能夠抓到每個動作的重心,人或偶的肢體自然呈現渾然天成的動作形式。相對於舞者往往過於急切地想模仿某種完美的姿態,因而落入「想太多」而弄巧成拙變得矯揉造作的窘境;只要操縱木偶的人放下心中的執念,認識到「偶的姿態並非(操偶的)手的動作的『再現』」,而是連結偶與手兩者的「支架與線之間的『平衡』」,那麼「重心」自然就會出現,木偶的動作也當然就會曼妙,甚至因其不被重力所限制,而能擁有比舞者更大的表現空間。
機器人發展史的研究者咸認為克萊斯特的這篇文章是個理論上的重要轉折。它從「不反思」這個認識論基礎出發,配合「支架/線」這個物件上的操偶架構,以「重心」為公式,為機器人學(Robotics)提出了一套完整的理論框架。
人工智能:內在的控制機制
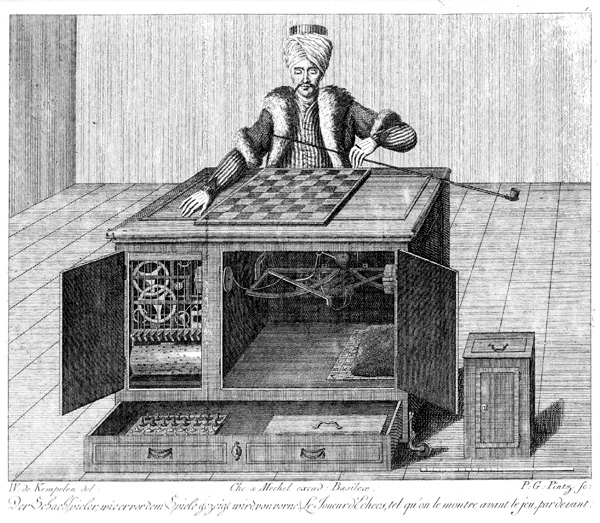
除了上述聚焦於可見的「支架/線」在控制(操偶)層面上問題之外,機器人學還有一個重要的源頭,也就是班雅明(Walter Benjamin)在〈歷史的概念〉(註3) 一文中所提及的土耳其外型機器棋手(圖1)。這個棋手是匈牙利發明家坎佩倫(Wolfgang von Kempelen)為了挑戰1769年來到奧地利女皇泰瑞莎(Maria Theresa)宮廷的法國發明家貝勒提耶(Pelletier)而發明的。這個土耳其棋手是機器人發展史上早期最深植人心的形象。(註4)
正如班雅明(Benjamin)已經清楚地點出來的,就「操偶」而言,必須考慮「(隱藏的)操縱者」所使用的是哪種操作介面。(註5) 除了認為這是魔術並信以為真的一般大眾之外,為了破解這個看似自動機(Automata)的機器棋手如何運作的問題,Karl Gottlieb de Windisch與Robert Willis等許多人都以圖示的方式指出「理性(內藏的人)+程式化的手部動作」這樣一種從機械外部看來可稱為「人工智能」的控制方式,正是當時被一般人視為是魔法的機器棋手表演得以大為轟動的基礎。
解剖學式的動作分析
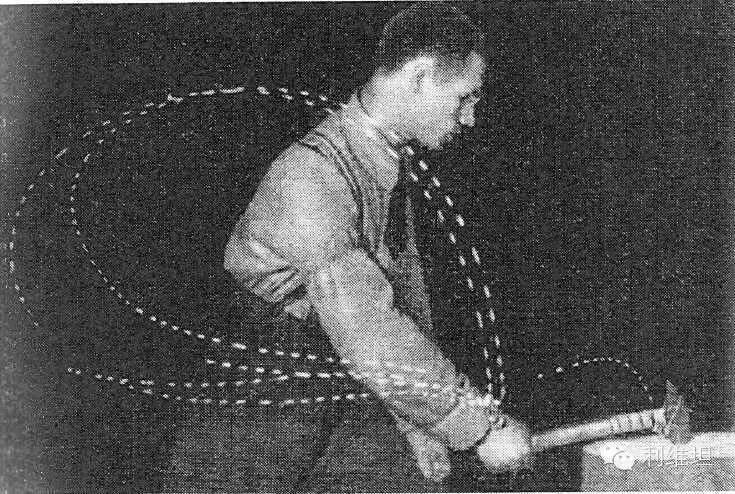
在上述的基礎上,我們必須再補充上Soraya de Chadarevian所謂「不流血的解剖學」這段歷史。(註6) 正如Soraya de Chadarevian所注意到的,19世紀中期以降的生理學與醫學藉由當時新發明的攝影技術,開始深入地記錄並考察人與動物的動作。由於攝影能夠快速地在極短的時間範圍內記錄動作的分解鏡頭,科學家因而能夠將一個完整的動作分解成一些不同單元的共同作用,不管是Aleksej Kapitanovic Gastev提出的「勞動藝術家」(圖2)、Sergej Eisenstein的「雙機械學」、還是Wsewolod Meyerhold的「生物機械學」都以「關節/肌肉」為基礎重整人類身體佈勢,為20世紀的「動作設計」奠定了基礎。正如Siegfried Zielinski所說的,這是一個時間經濟學的構想。(註7) 不管是人還是模仿人類動作來製作的機器人,在其基本的肢體設計上所採取的都是「關節/肌肉」這樣的基本組合,以及由此而來的動作分析(與組合)。
身段
正是在(一)人類思考與動作呈現並無必然關連;(二)人工智能必須輔之以相應的程式化身體;(三)以「關節/肌肉」為基本的動作分析,這三個機器人史發展重要里程碑的背景下,我們打算回頭審視《梨園新意:蕭賀文》這場表演。我們將焦點集中在舞者蕭賀文以及機器人偶蕭賀文兩個上場的表演者上,觀察她們兩者的動作方式。如果我們以數位藝術中心技術團隊的原始想法,用舞者蕭賀文的動作來校正機器人偶蕭賀文的動作,我們發現機器人偶的動作明顯無法到位。
在「人類思考與動作呈現並無必然關連」這個前提下深入思考「機器人偶動作無法到位」這個問題,我們會在「人工智能/程式化身體」這種組合的基礎上找尋問題所在。對我們來說,在「人工智能」這個面向上,程式語言對動作的模擬除了運算速度仍然無法跟上人類動作的靈敏度之外,在模擬成效上並無太大差異。之所以在視覺上機器人偶蕭賀文仍無法成功地擁有與舞者蕭賀文一般的「身段」,我們認為問題出在前述歷史轉折的第三點,以「關節/肌肉」為基本元素的動作分析這個問題上。
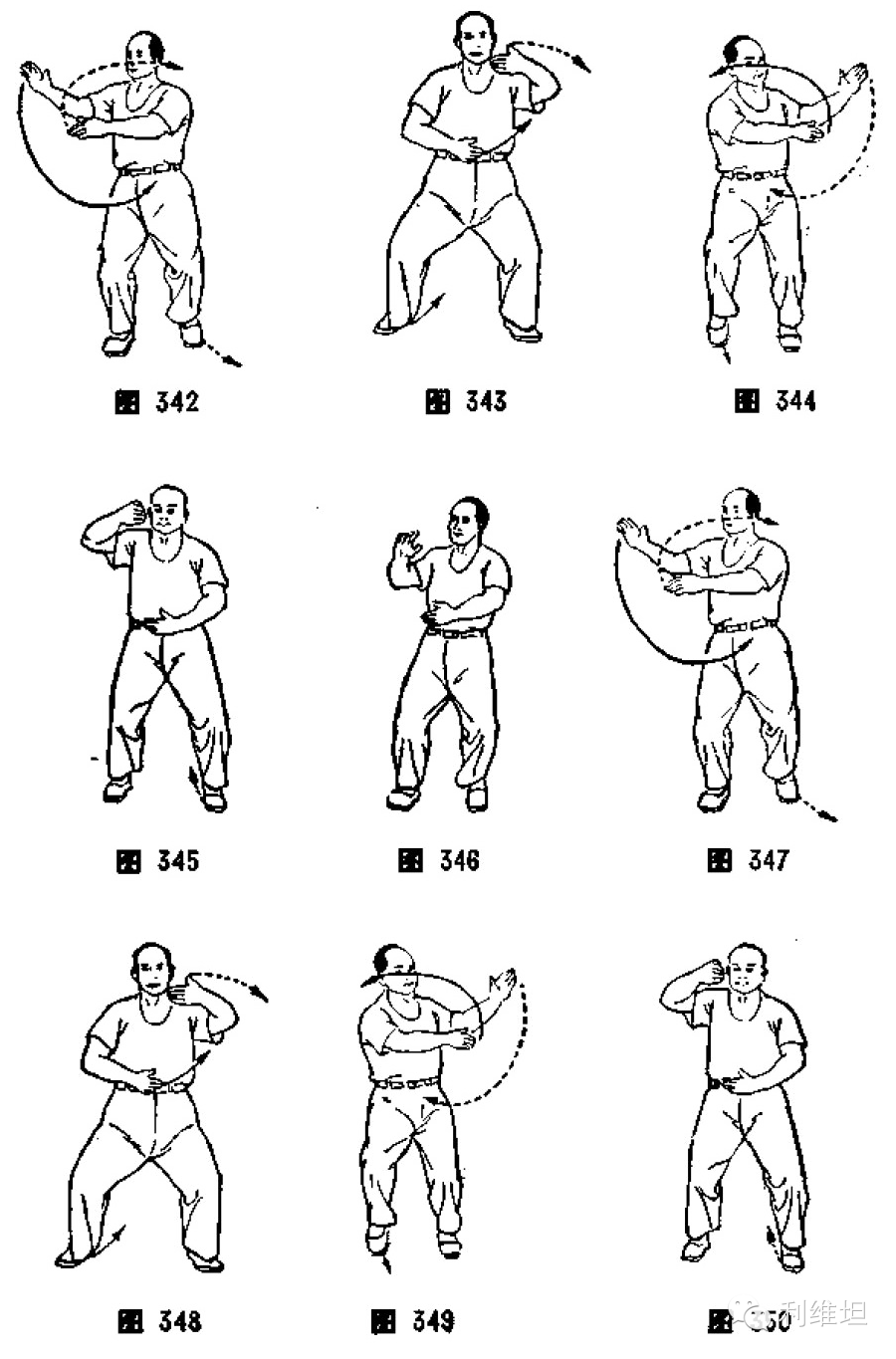
現有的機器人都以19世紀中期以降西方生理學與醫學所發展出來的人體架構為基礎,在這個架構下處理各種肢體動作的綜合。然而,如果我們轉個角度來到漢文化,清人黃旛綽《梨園原》中的〈身段八要〉強調「辨八形、分四狀、眼先引、頭微晃、步宜穩、手為勢、鏡中影、無虛日」,其中對於手、眼、身、髮、步…等等身體部位的描述全然不同於19世紀中葉以降迄今的生理學醫學傳統。從單純的身體動作諸如山膀、雲手 (圖3)、走邊、起霸、趟馬,到與扇子、雨傘、劍穗、噴火、水袖…等器物服飾共同作用的姿態,都是以肩、背、胸、肋、腰、腹、臀、胯、腿、踝、腳…等這樣的身體觀出發 (註8)。在這種比較下,我們認為機器人偶蕭賀文之所以無法擁有「梨園身段」,問題在於基本的機器人設計上並未符合梨園身段論對於身體的設想,在這個大前提並未符合的情況下,解剖學式的動作分析必然與梨園戲曲的身段大相逕庭,兩者之間存在的巨大落差也就不足為奇了。